
Chœur tac-til
ROBOT HAPTIQUE
"Haptique est un meilleur mot pour tactile puisqu'il n'oppose pas deux organes de sens, mais laisse supposer que l'oeil peut lui-même avoir cette fonction qui n'est pas optique" Deleuze, Mille Plateaux, Editions de Minuit, Paris 1980, p.614
Ce robot a permis d'élaborer une écriture commune au choeur, celle ci est intégrée, c'est pourquoi en 2018, le choeur s'allège du robot et de son dispositif afin d'entamer de nouvelles recherches axées sur le corps en mouvement et la spatialisation vocale.
Toutefois celui ci est disponible pour d'autres expériences, allant de une voix à 10 voix.
I . Robot Haptique alliant mécanique, électronique, informatique
Cette création est le fruit d'un travail au long cours, qui met à contribution les studios et les outils du Gmem Cncm de Marseille, mais surtout ses savoir-faire dans le domaine de la technologie. Charles Bascou, ingénieur-developper et assistant musical du Gmem et Natacha Muslera, ont mis au point un nouvel outil de composition et d'interprétation vocale. Il s'agit d'un robot haptique permettant d'interpréter en temps réel grâce à un mode de transmission tactile, une écriture vocale par contact qui se compose et se dirige simultanément. Avec l'aide technique de Jérôme Decque (directeur technique au gmem) ce robot a pu voir le jour.
En fabriquant une lutherie spécifique reliée au logiciel Max/MSP — logiciel qui permet de manipuler en temps réel un signal sonore (audio ou midi) — une écriture musicale tactile par contact peut se concrétiser.
Cet outil dit "robot haptique" capable de transmettre des indications dans le noir, à partir d’un pupitre sensoriel (émetteur de pressions au creux de la main), éclate les modes de représentation habituelles car il permet d'interpréter une composition vocale, sans support visuel (partition, chef d'orchestre).
TABLETTE TACTILE • Émetteur
La conduite L'interface de commande est une tablette tactile (Ipad). L'écran est partagée en deux zones tactiles pour les 2 mains dirigeant les 2 groupes de choristes. Nous avons développé une reconnaissance gestuelle simple sur chacune d'elle qui permet de signer les différents codes ou matières sonores. Cela permet une manipulation les yeux fermés.
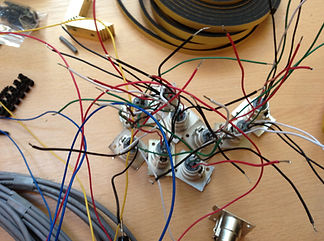
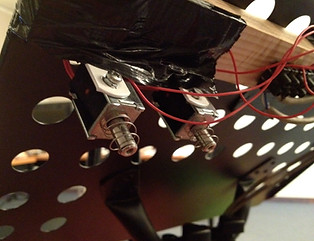
PUPITRES TACTILES • Récepteur
Les 2 mains sont posées à plat sur la surface du pupitre. Chaque pupitre est équipé d'électro-aimants (en dessous de la paume de la main) et reliés à une carte de commande permettant de les piloter depuis l'ordinateur. Les électro-aimants sont fixés par en dessous et établissent un contact avec des points de la paume de la main. 3 électro-aimants (ou points de contact tactile) sont prévus par pupitres. 2 sur la main gauche pour la définition des matières sonores, 1 sur la main droite pour indiquer un silence, un cut. Entre l'émetteur et le récepteur, un programme écrit en Max/MSP permet de connecter toutes ces entités et de définir le solfège tactile, l'écriture.
Un ROBOT HAPTIQUE interactif ( alliant mécanique, électronique et informatique) à été conçu, inventé pour le choeur, associé à un code digital en processus (inspiré du code morse) : Les mains de chaque membres du choeur sont posées sur la surface d'un pupitre d'orchestre (paume : partition), en tout dix pupitres, derrière chaque pupitre un boitier muni d'éléctro-aimants ou de picots. Ces électro-aimants émettent des impulsions sous les paumes de la main.
Chaque impulsion correspond à un code, chaque code correspond à une information de matériaux vocaux qui s'élaborent depuis 2013.
Ce dispositif a été imaginé et conçu par Natacha Muslera, (chercheuse et compositrice), qui se consacre depuis 2012 à créer de nouveaux modes compositionnels au sein du chœur : code digital, écriture par contact, haptik partition, écriture empathique...)
Le chœur développe des modes de jeux, d'interactions axées sur des rapports d'écoutes multiples, ayant comme matrice l'improvisation. Le robot interactif s'intègre au chœur pour une des créations en cours, cela interroge nos pratiques et rapport avec les machines, tout en les réinventant
Phase I avec robot et impulseur/compositeur Chaque membre du choeur peut impulser et composer une pièce vocale dans l'instant, avec l'aide d'une tablette tactile, où chaque geste (constitué pendant plusieurs années) correspond à un code digital et vocal, que traduit le robot sur les paumes de la mains .
Phase II avec robot Une première pièce de 20 minutes, entièrement impulsée et composée de manière aléatoire par le robot. Le choeur interprète librement dans l'instant .
Phase III avec robot une pièce de 45 minutes entièrement impulsée et composée de manière aléatoire par le robot. Le chœur interprète librement dans l'instant .
VERSION 1.0 DU ROBOT HAPTIQUE (PROTOTYPE)
Lutherie pour 10 pupitres Impulsion tactile par électro-aimants

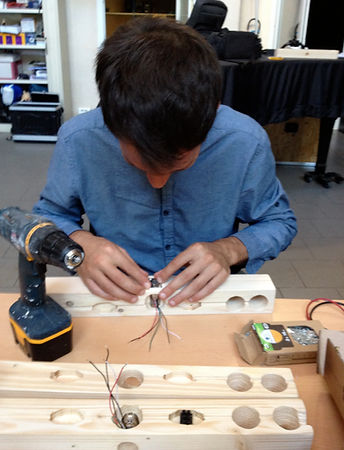
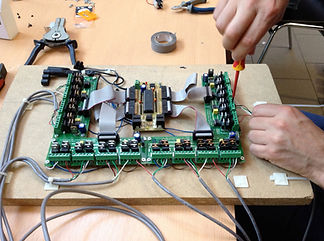
 Prototype_I_pupitre72 |  Lutherie des pupitres |  Boitier de commande terminé |
|---|---|---|
 |
